top of page
Gizmo: Physical Computing
小型产品的设计与应用
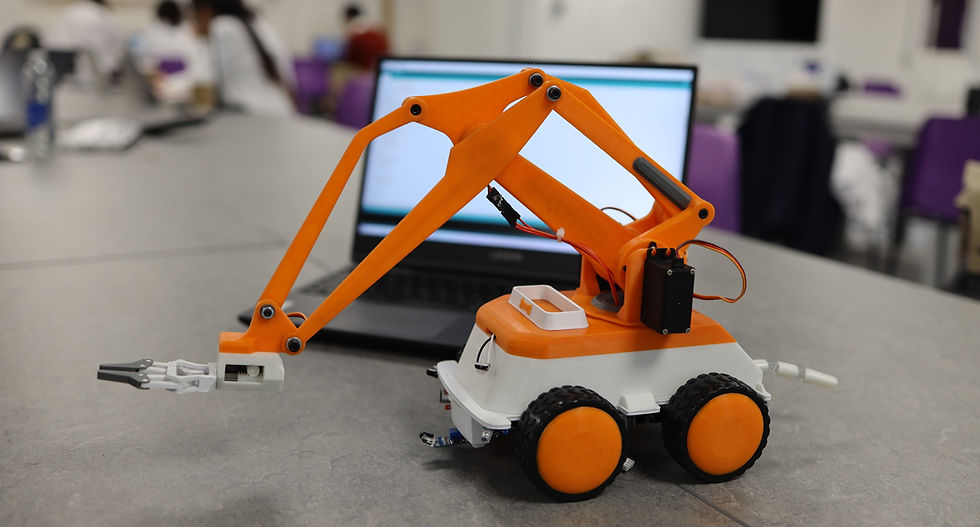
Cyber Retriever
本项目旨在模仿寻回犬的行为,创造一个有趣的互动机器人。应用场景是工作和学习后的疲惫时刻,用户需要消耗一定能量以保持高效思考,同时也需要一些 有趣的游戏和互动来帮助自己放松。
赛博猎犬可以为用户叼回零食。当它返回主人身边时,如果主人给予奖励(通常是一根骨头),零食会被交给主人。如果主人尝试不奖励就拿走零食,经过一定次数后,机器人会将零食丢到地上并跑开。如果主人对赛博猎犬大喊,它会 后退并表现出害怕的情绪,但最终仍会回到原位,因为狗始终无条件地爱着主人。
该产品使用 机械臂来模拟狗的头部,并通过夹取、摆动、后退 等动作展现抓取、拒绝和害怕等情绪和行为。当用户在短时间内索取过多零食时,它会提醒用户 “你吃太多了”。
设计 - Bo Cai
结构设计 - Xiao Jin
代码 - Xiao Jin & Bo Cai
结构设计 & 加工制造



















演示视频

![SOLIDWORKS Premium 2020 SP0.0 - [final.SLDASM _] 2022_12_1 12_39_57.png](https://static.wixstatic.com/media/51e325_347d7dd4ed0844df9bf02eb17ca4aa6f~mv2.png/v1/fill/w_676,h_366,al_c,q_85,usm_0.66_1.00_0.01,enc_avif,quality_auto/51e325_347d7dd4ed0844df9bf02eb17ca4aa6f~mv2.png)
bottom of page